Robot Car
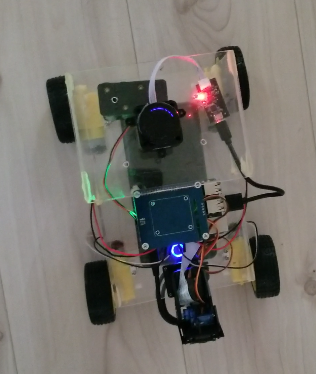
For this project, I designed and assembled a fully custom Raspberry Pi–powered robot car to deepen my understanding of robotics, electronics, and embedded systems. The hardware build included a Raspberry Pi SBC, DC motors, a motor controller shield, infrared and ultrasonic sensors, a LiDAR module, a PiCamera, and a rechargeable battery pack—all mounted on a plexiglass chassis to create a compact, mobile robotics platform.
On the software side, I implemented a TCP server on the Raspberry Pi to handle navigation commands, system status, and sensor data, along with a UDP server dedicated to streaming the camera feed in real time. This communication architecture provided a responsive and efficient control interface.
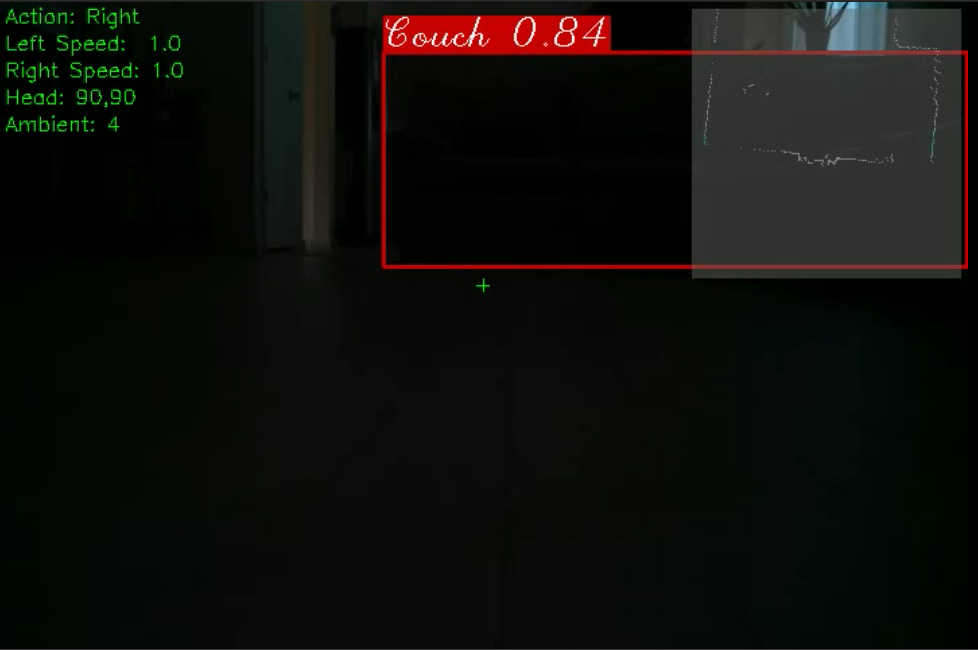
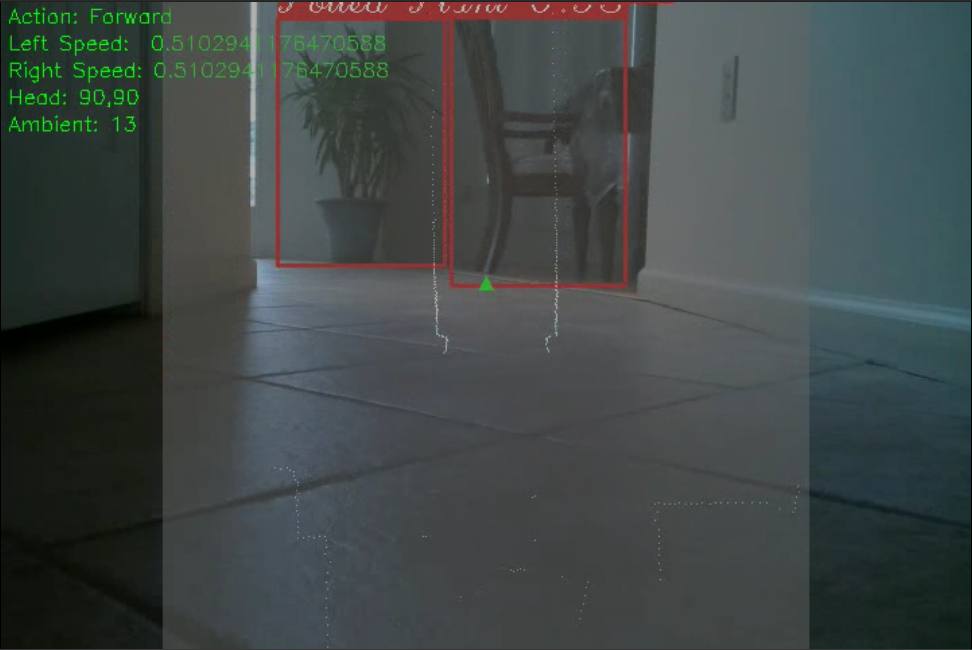
To operate the robot, I developed a desktop client application using Tkinter, OpenCV, and YOLO-based models (YOLOv3/YOLOv8). The client enabled remote control of the robot while simultaneously processing the live video feed for object detection and motion tracking using dense optical flow. These computer-vision features allowed the robot to interpret and respond to its environment, forming the foundation for more advanced autonomous behaviors.
This project brought together hardware assembly, low-level networking, computer vision, and machine learning to create an end-to-end mobile robotics system.
Images